Recherche et mise en œuvre d'une technologie de mise au point automatique de lentille infrarouge basée sur un réseau de portes programmables sur site
- Partager
- Heure de diffusion
- 2021/11/19
Résumé
Compte tenu des caractéristiques générales du bruit de frange verticale et du bruit aléatoire dans les images infrarouges, cet article améliore et optimise l'algorithme d'évaluation de la netteté infrarouge et l'algorithme d'escalade dans le processus de mise au point.

La technologie de mise au point automatique joue un rôle important dans le domaine de la surveillance par imageur thermique infrarouge. À l'heure actuelle, la technologie de mise au point automatique infrarouge présente certains problèmes, tels qu'un faible taux de réussite, une architecture complexe et une faible vitesse de mise au point. Par conséquent, cette étude propose une technologie de mise au point automatique des lentilles infrarouges basée sur FPGA, qui réalise les fonctions de traitement, d'affichage et de mise au point automatique des images infrarouges avec un seul FPGA.
Compte tenu des caractéristiques communes du bruit de bande verticale et du bruit aléatoire dans les images infrarouges, cette étude améliore et optimise l'algorithme d'évaluation de la définition infrarouge et l'algorithme d'escalade dans le processus de mise au point. Les résultats expérimentaux montrent que l’algorithme et la méthode de mise en œuvre proposés dans cette étude peuvent aider à se concentrer remarquablement sur la lentille infrarouge. Parallèlement, le procédé proposé présente des caractéristiques telles qu'une intégration élevée, une vitesse de mise au point rapide et un taux de réussite élevé, et présente ainsi de larges perspectives d'application.
La technologie d’imagerie thermique infrarouge a été largement utilisée ces dernières années dans les domaines de la défense nationale, de la guerre, de la détection, de la surveillance et dans d’autres domaines. Pour les moniteurs d'imagerie thermique utilisés dans les défenses frontalières et côtières, la plaque tournante infrarouge a besoin d'une période fixe de rotation et de positionnement pendant son utilisation pour atteindre l'objectif de patrouille. Chaque fois qu'il se tourne vers une nouvelle position, il doit être recentré pour obtenir un affichage d'image clair. Par conséquent, la fonction de mise au point automatique de la caméra thermique infrarouge peut grandement faciliter l'observation et l'utilisation de l'opérateur.
Par rapport à la technologie d'imagerie à lumière blanche visible, la technologie d'imagerie infrarouge réalise une imagerie de l'objet observé en fonction du chauffage de l'objet observé lui-même. Étant donné que son principe d'imagerie est incompatible avec le principe d'imagerie par lumière blanche visible, la technologie d'imagerie infrarouge et la technologie d'imagerie par lumière blanche ont un certain degré de réalisation. La différence. La technologie de mise au point automatique basée sur l’image est très mature dans le traitement des images en lumière blanche. Dans la littérature [1] et la littérature [2], l'auteur utilise respectivement PC et FPGA pour compléter la mise au point automatique de l'objectif basée sur des images en lumière blanche visible.
Dans les applications pratiques, les performances de l'imageur de détection infrarouge sont affectées par de nombreux facteurs tels que les détecteurs infrarouges, les circuits de conversion analogique-numérique, la dissipation thermique structurelle et les lentilles optiques. La technologie traditionnelle de mise au point automatique des images en lumière blanche a un effet médiocre sur la mise au point automatique des images infrarouges. Il est donc nécessaire de proposer une technologie d'autofocus basée sur les caractéristiques de l'image infrarouge elle-même (phénomène de bandes verticales, bruit excessif, etc.).
Cet article propose une technologie de mise au point automatique des lentilles infrarouges basée sur FPGA. Par rapport à la littérature [3], il améliore l'algorithme d'évaluation de la qualité d'image pour les caractéristiques des bandes verticales dans l'image infrarouge. Par rapport à la littérature [4], l’image infrarouge est bruitée. Caractéristiques Optimisez l'algorithme d'escalade pour obtenir le contrôle de l'objectif.
Par rapport à la littérature [5], cet article ne s’appuie pas sur la participation de l’ordinateur hôte. Il est entièrement implémenté par le FPGA lui-même pour réaliser l'acquisition d'images, l'optimisation d'images, l'évaluation de la définition d'image, la mise en œuvre d'algorithmes d'escalade, le contrôle du moteur, etc. Dans le travail, il améliore considérablement l'intégration de l'ensemble de la caméra thermique.
1. La composition de la caméra thermique et le principe de mise au point automatique
1.1 Composition de la caméra thermique
L'imageur thermique avec fonction de mise au point automatique proposé dans cet article est illustré à la figure 1. Les principaux composants comprennent la lentille infrarouge, un détecteur infrarouge, un circuit de traitement d'image, un circuit FPGA, une DDR3, un circuit d'entraînement de moteur, un moteur de mise au point et un mécanisme de mise au point. (engrenage mécanique).

Fig.1 Imageur thermique infrarouge à mise au point automatique
1.2 Le principe de fonctionnement de la caméra thermique et le principe de fonctionnement de la mise au point automatique
L'architecture principale de l'imageur thermique infrarouge est illustrée à la figure 2.
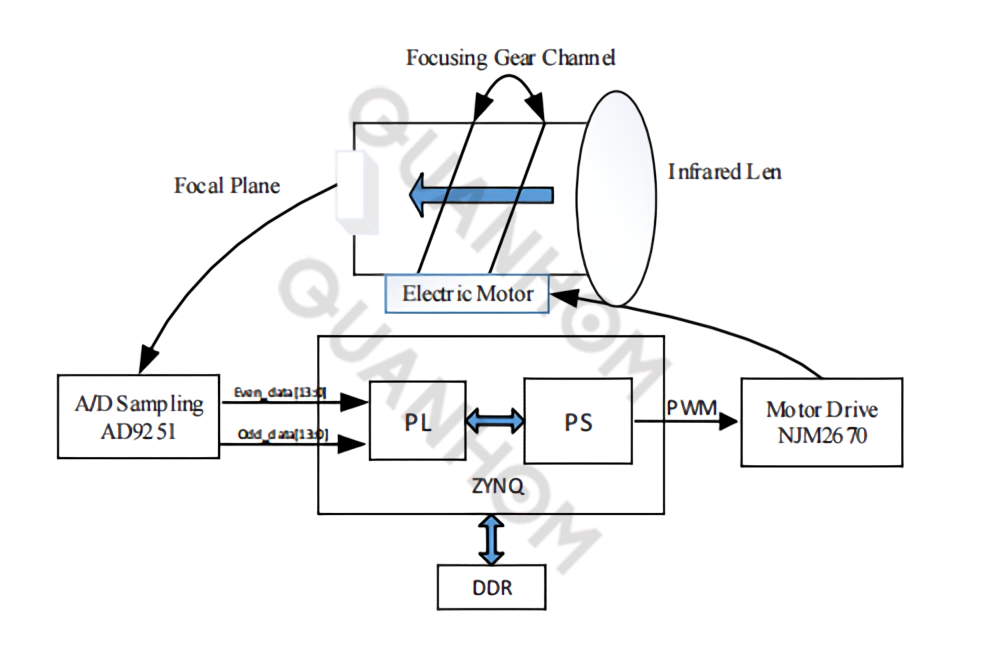
Fig.2 Structure principale de la caméra thermique infrarouge
À partir de la figure 2, nous pouvons voir la composition de l’ensemble de la caméra thermique. Le flux de travail de la caméra thermique est le suivant.
(1) La lumière pénètre dans le plan focal du détecteur infrarouge à travers la lentille infrarouge. La longueur d'onde efficace du spectre que la lentille infrarouge peut traverser est de 8 à 12 m, ce qui peut filtrer la lumière blanche visible.
(2) Le plan focal infrarouge convertit la lumière infrarouge en signaux électriques. La résolution d'imagerie effective du plan focal infrarouge sélectionné est de 720 × 576.
(3) Le signal émis par le plan focal infrarouge est un signal vidéo analogique, qui doit être converti numérique-analogique dans le circuit, et le signal analogique infrarouge est converti en données vidéo numériques paires et impaires de 14 bits avec le Puce de conversion AD AD9251.
(4) Les données de parité doivent être réorganisées à l'intérieur du FPGA, puis le traitement post-image tel que la correction non uniforme, l'amélioration de l'image, les bandes verticales et la compensation de température est effectué sur l'image infrarouge. Cette partie n’est pas l’objet de cet article et ne sera pas abordée.
Dans cette étape, les données de parité générées à l'étape (3) doivent être regroupées ligne par ligne pour former une image complète. Les valeurs de gris de deux pixels adjacents dans chaque ligne de l'image proviennent de sources différentes (canaux de parité). Produire le phénomène des « stries verticales ». Les rayures verticales sont courantes en imagerie infrarouge. Dans cette étape, le FPGA optimise l'image pour éliminer les interférences causées par les bandes verticales et rendre l'ensemble du cadre de l'affichage de l'image de plus en plus fluide.
(5) Les données d'image traitées sont codées au format vidéo PAL via un circuit externe et directement sorties sur l'écran, ou elles peuvent être compressées et codées sur le serveur pour être affichées via le réseau. Pour la mise au point automatique, il doit s'appuyer sur les données d'image générées à cette étape.
(6) Effectuer une évaluation de la clarté de l’image sur la base de l’image générée en (5). Le FPGA dispose de puissantes capacités de traitement pour les données parallèles, c'est pourquoi un algorithme d'énergie de gradient est sélectionné pour une évaluation de la clarté. L'algorithme d'énergie de gradient couramment utilisé nécessite un traitement de données pour tous les pixels de l'image entière, ce qui nécessite une quantité de calcul relativement importante et un temps de traitement long. Cet article propose un algorithme amélioré d'énergie de gradient pour évaluer la clarté de l'imagerie, voir le chapitre 2 pour plus de détails.
(7) L'extrémité PL du FPGA transmet le résultat de l'évaluation de la clarté de l'image au lien suivant pour traitement. Pour cette étape, l’ensemble (6) et (7) de la conception de la littérature [5] s’appuie sur l’implémentation PC de l’ordinateur hôte. Cet article continuera à mettre en œuvre la mise au point automatique basée sur la clarté au sein du FPGA.
(8) L'extrémité PL du FPGA utilise l'algorithme d'escalade pour contrôler le moteur en fonction des données d'évaluation de définition, puis ajuste la distance focale de l'objectif, obtenant enfin une image claire et complétant la mise au point.
L'algorithme d'escalade est largement utilisé dans la mise au point automatique de l'imagerie par lumière visible. Cependant, en raison du bruit important et des bandes verticales de l'image infrarouge elle-même, un état de « pseudo-colline » apparaîtra pendant le processus d'escalade. L'existence de « faux sommets » conduira directement à l'échec de l'autofocus. Pour cette raison, cet article a optimisé et amélioré l'algorithme d'escalade, voir le chapitre 3 pour plus de détails.
En résumé, le processus de réalisation de la mise au point automatique est illustré à la figure 3. L'ensemble du processus est un processus de rétroaction en boucle fermée, qui nécessite des ajustements et des optimisations répétés pour finalement atteindre l'état le plus clair de l'image, c'est-à-dire l'état focalisé. Cet article utilise le FPGA FXC7Z030-2FBG676 de la série ZYNQ de Xilinx pour implémenter les étapes (4) à (8) ci-dessus. ZYNQ est divisé en fin PL et fin PS.
L'extrémité PL est un réseau de portes logiques programmables pour le traitement de l'image et l'évaluation de la définition, et l'extrémité PS est un noyau ARM, utilisé pour mettre en œuvre des algorithmes d'escalade et le contrôle du moteur. Dans le même temps, le FPGA est équipé en externe de deux puces DDR3, le modèle est le MT41J128M16HA de Micron, avec une capacité de puce unique de 256 Mo et deux puces d'une capacité de 512 Mo, qui sont utilisées pour mettre en cache les données d'image vidéo.
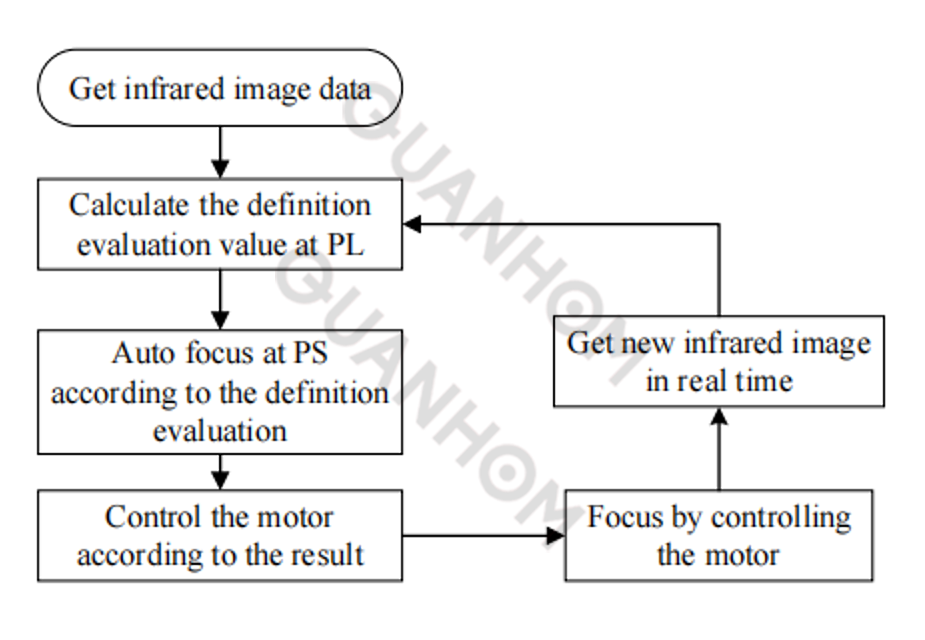
Fig.3 Processus de mise au point automatique
2. Réalisation de l'évaluation de la qualité des images infrarouges dans FPGA
2.1 Algorithme d'évaluation de la clarté
La littérature [6] donne une introduction complète et spécifique à l’algorithme d’évaluation de définition, combinant les caractéristiques des images infrarouges et la difficulté de mise en œuvre des FPGA. Dans cet article, un algorithme d'énergie de gradient est utilisé pour juger de la netteté de l'image.
Comme le montre la figure 4, la somme des différences carrées est effectuée sur les valeurs de gris des pixels dans la zone de masque 3 × 3 des pixels de l'image.
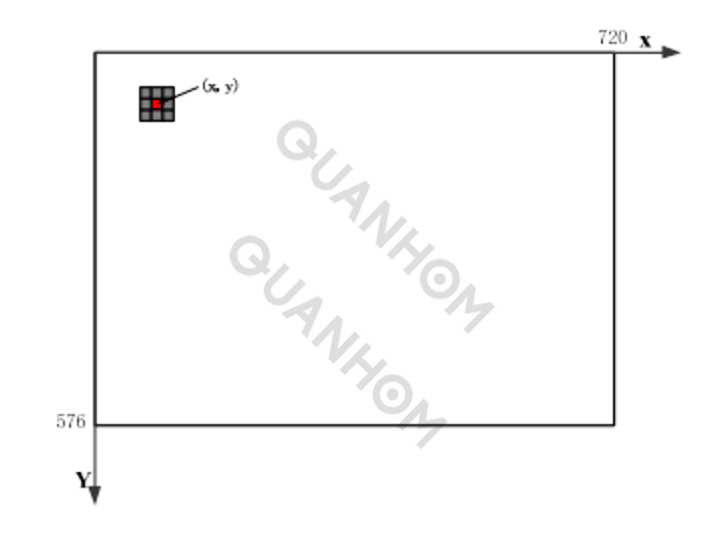
Fig.4 Calcul de l'énergie du gradient à l'aide d'un masque 3 × 3
Pour le pixel (x, y) de la figure, définissez sa valeur d'énergie comme F(x, y) comme la somme des carrés des valeurs de gris de ses 8 pixels voisins environnants et de leurs différences. Comme le montre la formule (1) :
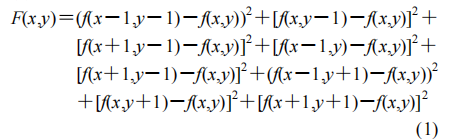
Ajoutez la somme de tous les carrés de différence de gris des pixels pour obtenir la valeur d'énergie du gradient d'une image :

Pour une image haute définition, parce que les détails de l'image sont plus nombreux, la valeur d'énergie du gradient Fvaleursera une valeur relativement importante. Pour une image floue, la valeur de chaque pixel n'est pas très différente, et la valeur de Fvaleurest également très petit. Pour une image à un seul pixel (toutes les valeurs de pixels sont les mêmes), Fvalue=0.
Par conséquent, la valeur de Fvaleurpeut refléter le degré de détail de l’image, qui à son tour reflète la clarté d’une image. L'algorithme d'énergie de gradient peut évaluer la netteté de l'image. Cet article utilise cet algorithme pour évaluer la netteté de l'image infrarouge.
2.2 Amélioration de l'algorithme d'énergie de gradient dans le jugement de la définition d'image infrarouge
L'énergie du gradient mentionnée dans la section 2.1 donne un bon résultat pour évaluer la clarté des images en lumière blanche visible. Cependant, comme les images infrarouges sont fusionnées par des données de colonnes paires et impaires (étape 3 mentionnée dans la section 1.2), les pixels adjacents gauche et droit sont grisés. La valeur du degré est très différente et l'effet de focalisation de l'utilisation directe de l'algorithme traditionnel d'évaluation de l'énergie du gradient n'est pas bon. Cet article a apporté certaines améliorations à l'algorithme en réponse à ce phénomène, en utilisant un masque 3×5 au lieu d'un masque 3×3, ce qui peut éviter la différence provoquée par les pixels d'image des différentes sources vidéo et réduire le bruit provoqué par la verticale. rayures jusqu'aux plus petites.
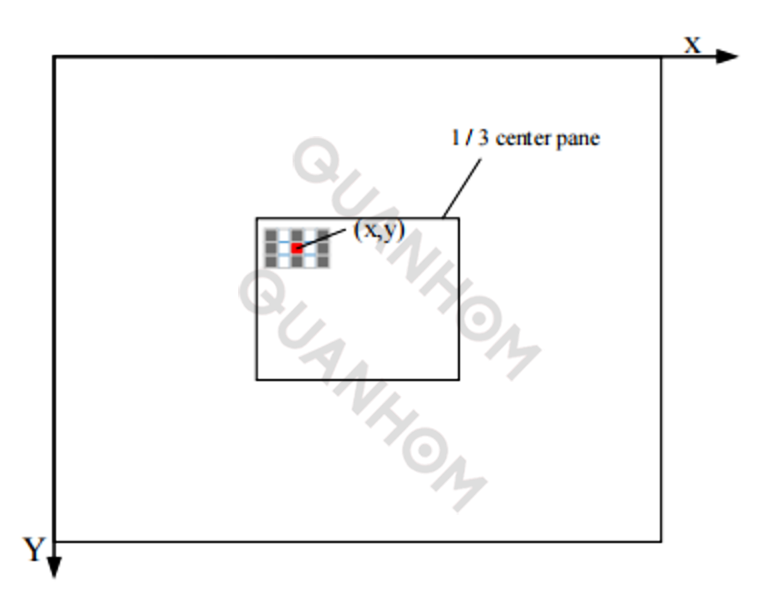
Dans le même temps, compte tenu des exigences de temps de mise au point automatique de la caméra thermique, le calcul de l'énergie du gradient utilisé dans cet article ne calcule pas la valeur des pixels de l'image entière mais prend les pixels dans la zone médiane du tiers pour le calcul, de sorte que le montant du calcul soit calculé pour l'ensemble de l'image 1/9 du montant. Après de nombreuses vérifications expérimentales, l'effet de mise au point automatique calculé en prenant 1/3 de la zone centrale de l'image est cohérent avec l'effet de l'image entière.
La sélection améliorée du masque et de la zone centrale est illustrée à la figure 5.
2.3 Implémentation de l'algorithme amélioré dans FPGA
L'extrémité PL du FPGA utilise FIFO et registre pour réaliser le tampon de 9 données de la fenêtre de masque. Le programme côté PL doit terminer ①concevoir la synchronisation des signaux de contrôle de lecture et d'écriture FIFO ; ②mettre en cache les données du masque 3×5 ; ③calculez la somme de la variance d'un masque 3×5 à un seul pixel et extrayez les données.
La figure 6 montre le diagramme schématique du contrôle interne de lecture et d'écriture du FPGA du FIFO. Lorsque la première ligne de données arrive, écrivez-la dans FIFO1 ; lorsque la deuxième ligne de données arrive, lisez la première ligne de données stockée dans FIFO1 et écrivez-la dans FIFO2, et écrivez la deuxième ligne de données dans FIFO2 en même temps ; lorsque la troisième ligne de données arrive, lisez les données dans FIFO1 et FIFO2 en même temps. A ce moment, la troisième ligne de données entre dans le groupe de registres suivant REG1 avec les première et deuxième lignes de données stockées dans FIFO1 et FIFO2 ~REG9. Les données de REG1~REG9 représentent respectivement (x-2,y-1), (x,y-1), (x+2,y-1), (x-2,y), (x, y), (x+2,y), (x-2,y+1), (x,y+1), (x+2,y+1) 9 points.
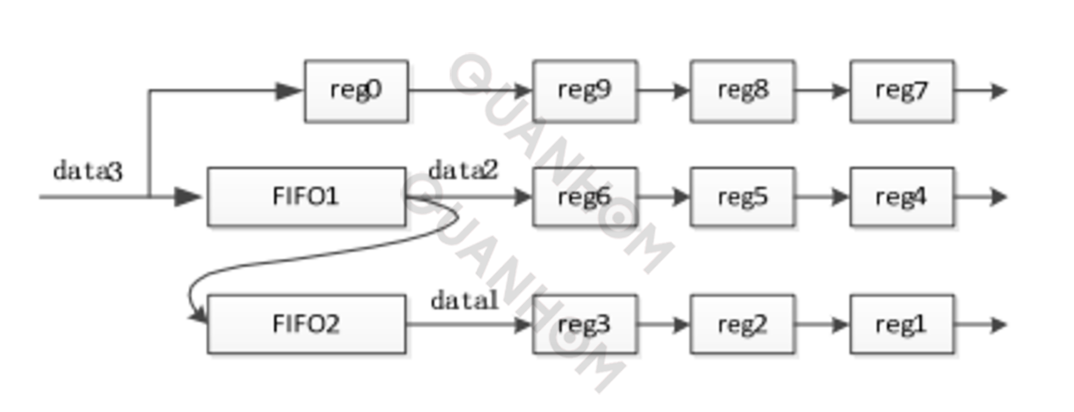
Fig.6 Cacher les données du masque 3 × 3 par FIFO et enregistrer
Selon les 9 données des registres REG1 ~ REG9 de la figure 6, le FPGA calcule la variance des valeurs de gris des pixels dans REG5 et les 8 registres restants (formule (1)). Étant donné que l'algorithme amélioré ne calcule que le tiers médian de la zone, le programme règle le compteur de colonnes et les compteurs de lignes pour compter les lignes et les colonnes d'un cadre de l'image. Lorsque le compteur de colonnes compte jusqu'à 241 ~ 480 et le compteur de lignes compte jusqu'à la plage de 193 ~ 384 (cette plage signifie que pour un écran de résolution 720 × 576, 1/3 du point de pixel dans la zone centrale), les données de pixels est considéré comme disponible pour le calcul. Accumulez les valeurs de variance de tous les pixels de cette plage et obtenez enfin une valeur d'énergie de gradient de 32 bits (formule (2)).
Selon la théorie présentée ci-dessus, plus la valeur de 32 bits est élevée, plus l'image est claire, ce qui constitue une base pour l'alpinisme afin d'effectuer un réglage de la mise au point ultérieurement.
3. Implémentation de l'algorithme amélioré d'escalade dans FPGA
3.1 Mise au point automatique basée sur un algorithme d'escalade
La référence [7] contient une introduction plus détaillée à l’algorithme d’escalade. Comme le montre la figure 7, le principe de base de l'algorithme d'escalade est un processus d'approximation continue de la valeur maximale de l'énergie du gradient. Comme le montre l'organigramme de mise au point automatique de la figure 3, l'image changera après chaque mise au point et l'énergie du gradient changera également en conséquence. Dans ce processus de changement continu, trouvez la valeur maximale de l'énergie du gradient, qui est le moment le plus clair de l'image. La position de l'objectif correspondant à l'image la plus claire est la position de mise au point.
Il ressort du diagramme schématique de la figure 7 qu'il y a 8 étapes d'escalade dans le processus de mise au point. Les 3 premières étapes sont toujours dans le processus « en montée », et les 4ème et 5ème étapes sont toujours dans le processus « en descente ». À ce stade, la situation est devenue pire que celle de l'étape 3 précédente, donc les 6e et 7e étapes commencent à « remonter la montagne ». Après la 7ème marche, j'ai déjà dépassé le sommet de la montagne, j'ai donc changé la longueur du pas et finalement grimpé jusqu'au "sommet de la montagne" à la 8ème marche pour terminer le travail de mise au point.
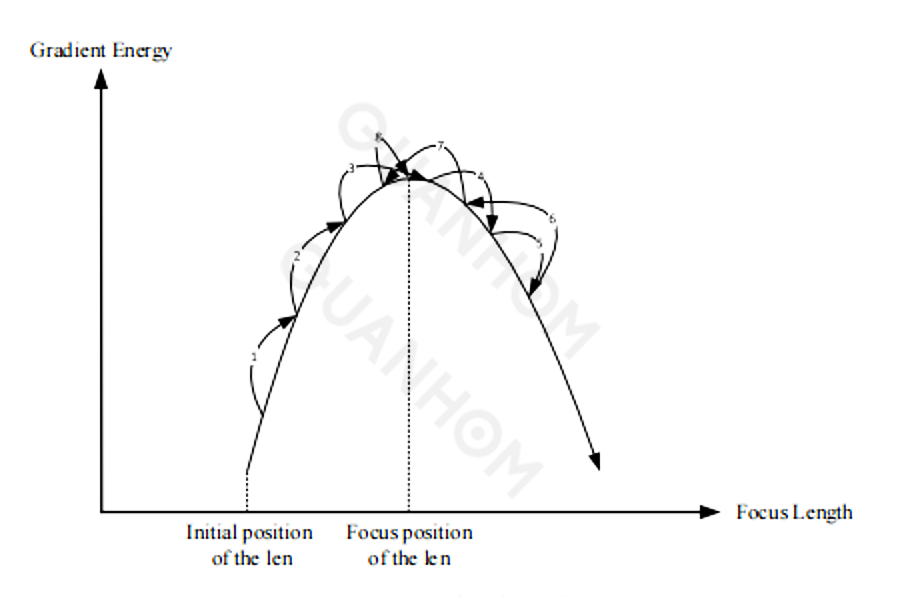
Fig.7 Algorithme d'escalade
Dans le travail réel, le processus d'escalade peut souvent être complété en 8 tentatives, au cours desquelles il est nécessaire d'ajuster continuellement la longueur du pas pour atteindre l'objectif de mise au point.
3.2 Amélioration et réalisation de l'algorithme d'escalade dans la mise au point automatique des lentilles infrarouges
La figure 7 montre la mise en œuvre de l'alpinisme sous l'écran de lumière blanche, ce qui est relativement idéal. Pour les images infrarouges avec un bruit relativement important, il y aura plusieurs « sommets de montagnes » pendant le processus d'escalade, comme le montre la figure 8.
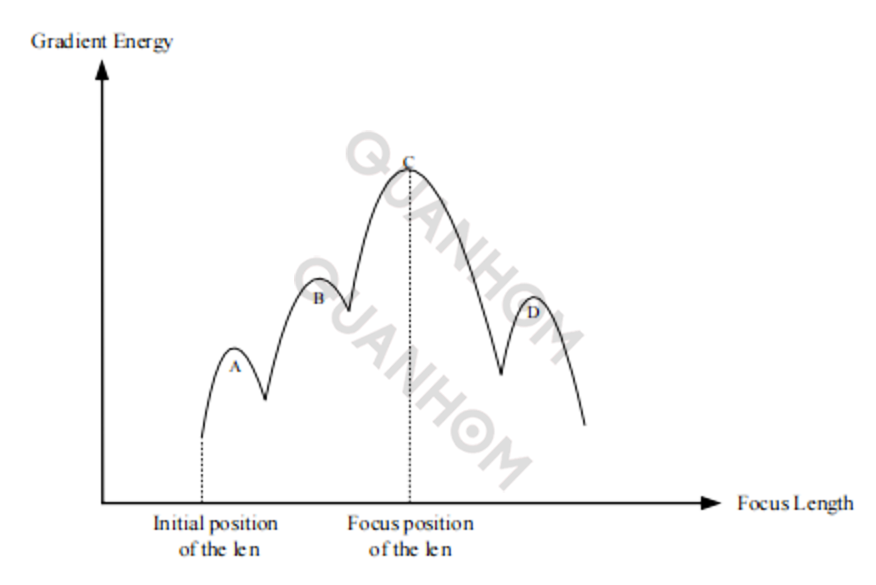
Fig.8 Escalade de la focalisation de l'image infrarouge
A, B et D sur la figure 8 sont des « pseudo-sommets de montagnes », provoqués par le bruit dans l'image infrarouge. Selon le processus standard d'escalade, à partir de la position initiale de la lentille pour gravir la montagne, il est facile de considérer à tort A comme le sommet de la montagne. À l’heure actuelle, l’objectif de la concentration ne peut pas être atteint. Pour cette raison, cet article optimise l’algorithme d’escalade pour la mise au point automatique des images infrarouges comme suit.
(1) L'extrémité PS du FPGA reçoit la valeur d'énergie du gradient transmise par l'extrémité PL pour déterminer s'il faut gravir la montagne. Afin de réduire l'influence du bruit, toutes les 3 valeurs reçues sont moyennées comme base pour l'escalade, c'est-à-dire pour calculer la valeur moyenne de trois valeurs d'énergie de gradient pour une image fixe, de manière à réduire l'influence du bruit aléatoire sur l'évaluation de la clarté de l'image.
(2) Concernant le mécanisme de jugement de « faire demi-tour et gravir la montagne », on juge qu'à la longueur de pas actuelle, s'il « descend la montagne » deux fois de suite, alors il commence à regarder en arrière. Sous ce mécanisme, les pics relativement petits de A et B rebondiront dans la valeur d'énergie du gradient au cours du deuxième processus de détermination, ce qui est jugé comme un faux pic, mais cette situation ne se produira pas au vrai pic C.
Sur la base des deux schémas d'optimisation ci-dessus, le processus de mise au point automatique sur le côté PS basé sur FPGA de cet article est illustré à la figure 9.
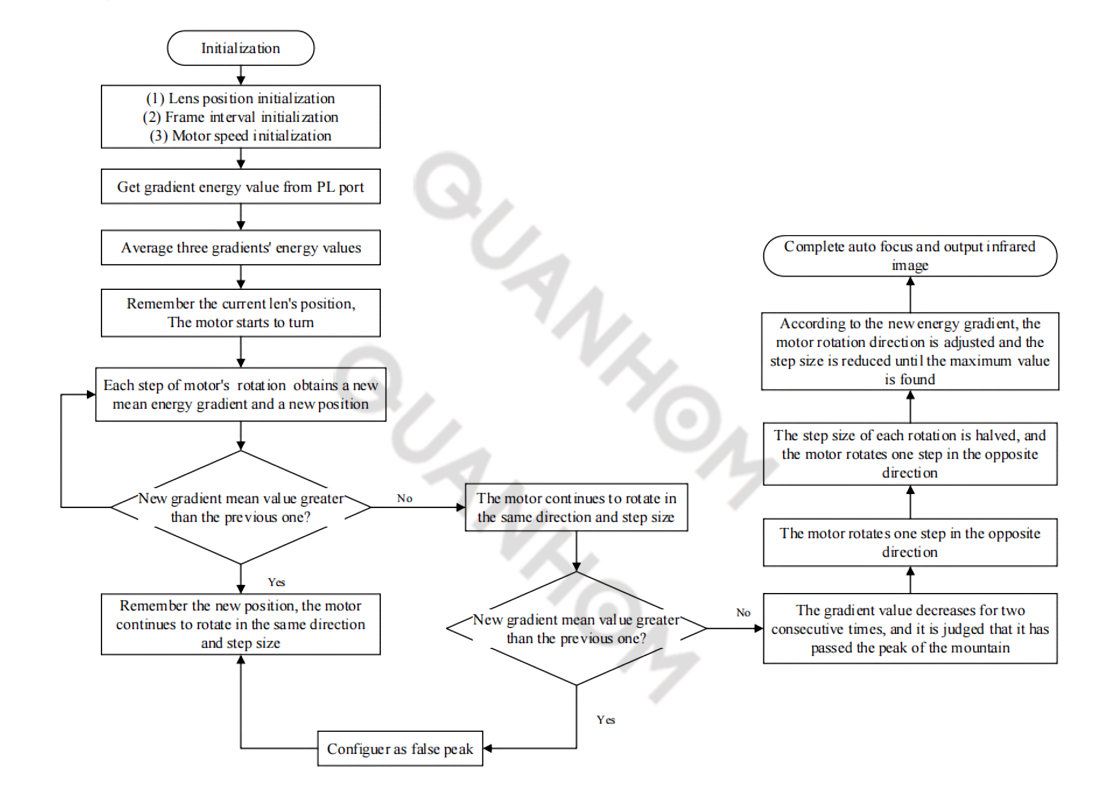
Fig.9 L'algorithme d'escalade amélioré implémenté sur FPGA PS
4 Réalisation des fonctions et test de performances
4.1 Effet de focalisation
La technologie de mise au point automatique proposée dans cet article et les méthodes de mise au point automatique proposées dans la littérature [2] et la littérature [4] sont reproduites et comparées respectivement. Comme le montre la figure 10.

(a) Image en lumière visible (b) Image originale infrarouge
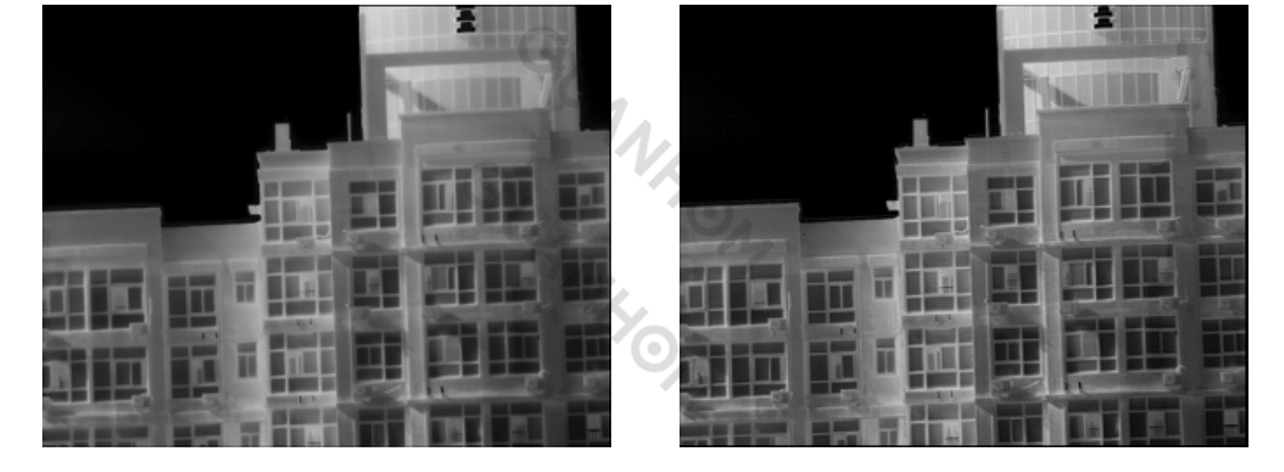
(c) Image implémentée dans le document[2] (d) Image implémentée dans le document[4]
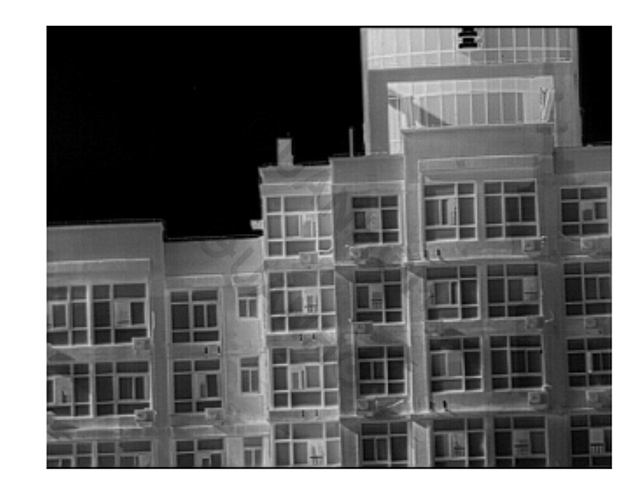
(e) Image mise en œuvre avec la méthode proposée dans cet article
Fig.10 L'effet de la mise au point automatique proposé dans cet article est comparé à d'autres schémas
Les 4 images infrarouges de la figure 10 montrent l'effet de focalisation de la lentille infrarouge. Pour ce processus de mise au point, puisque l'image originale est relativement claire, la capacité de l'algorithme de mise au point à lire et à traiter les détails de l'image sera testée. Pour évaluer objectivement la netteté des quatre images (b), (c), (d) et (e), la « valeur de variance en échelle de gris » proposée dans la référence [8] est utilisée pour évaluer la netteté des quatre images. .
Par rapport à une image floue, une image avec une mise au point nette devrait présenter une plus grande différence d'échelle de gris entre ses données, c'est-à-dire que sa variance devrait être plus grande. La netteté de l'image peut être mesurée par la variance des données en niveaux de gris de l'image, plus la variance est grande, ce qui signifie meilleure est la clarté.
Calculez la valeur de variance en échelle de gris de l'image dans MATLAB et les résultats sont présentés dans le tableau 1.
Tableau 1 Variation de gris de quatre images
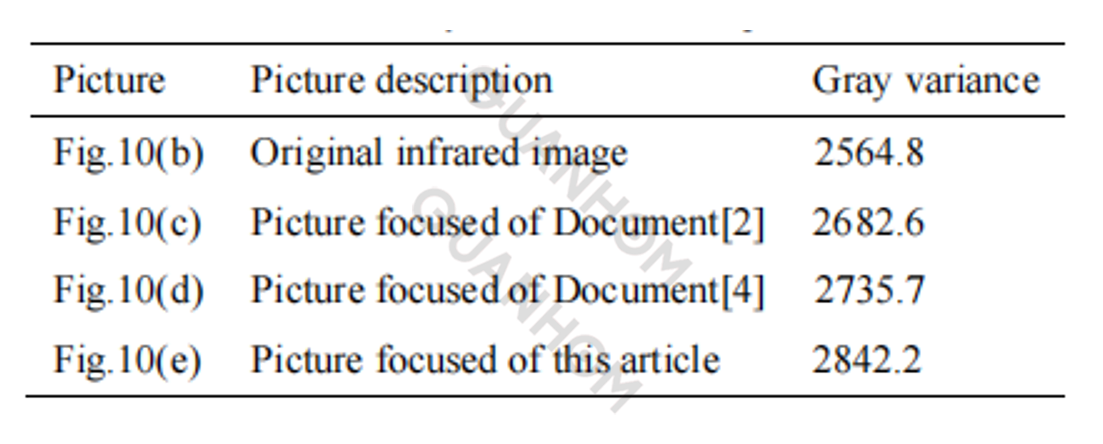
On peut le voir sur l'image de la figure 10 et du tableau 1 :
L'image infrarouge originale (b) n'a subi aucun traitement de focalisation. Bien que l'image puisse montrer l'image de l'objet, elle est encore un peu floue à l'œil nu et sa valeur de variance en échelle de gris est relativement faible, ce qui indique que les détails ne suffisent pas.
(c) L'image est traitée par la méthode de mise au point de l'image en lumière blanche, sans tenir compte des caractéristiques de bruit de bande verticale de l'image infrarouge. L'effet de mise au point est donc général et peut être vu à partir de la valeur de variance de l'échelle de gris.
(d) L'effet d'affichage de l'image est amélioré dans une certaine mesure par rapport à (c), mais il ne peut pas atteindre l'effet de l'algorithme (e) proposé dans cet article. Il se pourrait que l’algorithme d’optimisation du processus d’escalade ne soit pas assez bon.
(e) L'image montre l'effet d'affichage focalisé obtenu par l'algorithme proposé dans cet article. On peut clairement voir que l'effet d'affichage est meilleur que (d) et (c).
La qualité déterminante de l'image peut également être constatée à partir de l'ampleur de la valeur de variance en échelle de gris des quatre images du tableau 1, et l'image après la mise au point de l'algorithme proposé dans cet article est la plus claire. Cela montre que l'algorithme proposé dans cet article a de bonnes performances et un bon effet dans le processus de mise au point automatique.
La figure 11 compare l'image d'affichage de mise au point obtenue après avoir calculé la valeur d'énergie de gradient de l'image entière et calculé la valeur d'énergie de gradient de la zone 1/3. L'image (b) sur la figure 11 est l'image (e) sur la figure 10.
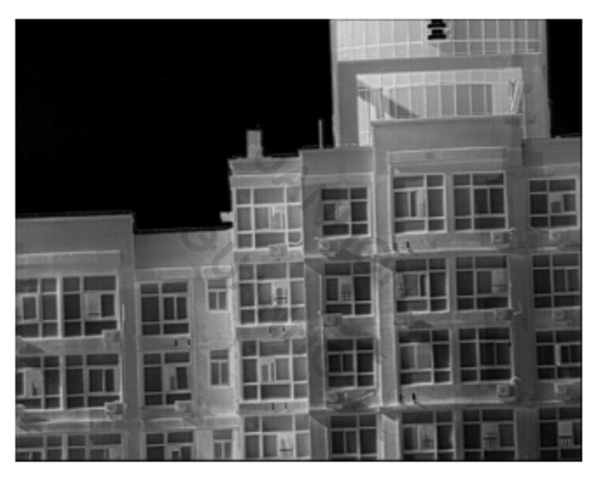
(a) Calcul de l'énergie du gradient d'image entière
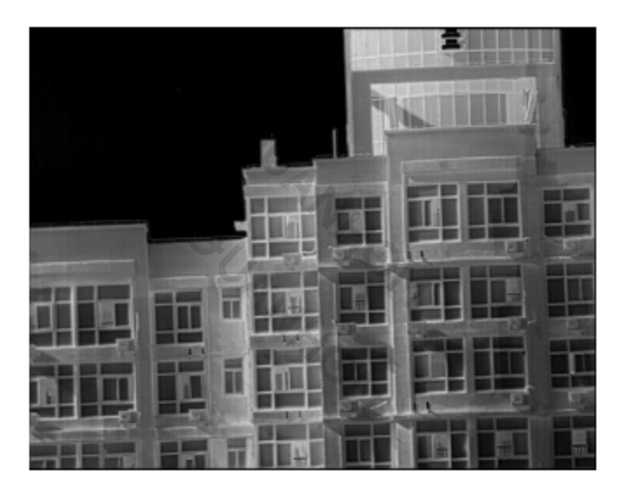
(b) Calcul de l'énergie du gradient d'image 1/3
Fig.11 Comparaison de l'affichage d'images basé sur l'énergie de gradient de deux régions
D’après la comparaison des deux images de la figure 11, il n’y a fondamentalement aucune différence. La différence entre la valeur quadratique moyenne des deux niveaux de gris est inférieure à 1, ce qui montre que la méthode proposée dans cet article pour obtenir la valeur d'énergie du gradient à partir du tiers central de l'image est réalisable. L'avantage de cet algorithme optimisé et amélioré est qu'il permet d'économiser dans une large mesure le temps de mise au point automatique et la consommation de ressources FPGA.
4.2 Courbe de montée pendant la mise au point
Cette section analyse les courbes de montée des trois algorithmes en cours de mise au point automatique. Étant donné que l'ensemble de l'alpinisme est réalisé sur la base de la rotation du moteur, l'ensemble du processus d'alpinisme peut être observé à travers l'angle de rotation du moteur.
Ce qui suit compare les trois algorithmes (référence [2], référence [4] et cet article) dans le processus de mise au point automatique, la rotation du moteur et la mise au point finale. Après le test précédent, il est conclu que le moteur doit tourner de 751 dans le sens positif de la position initiale à la position de mise au point, qui est la ligne pointillée de référence horizontale sur la figure 12.
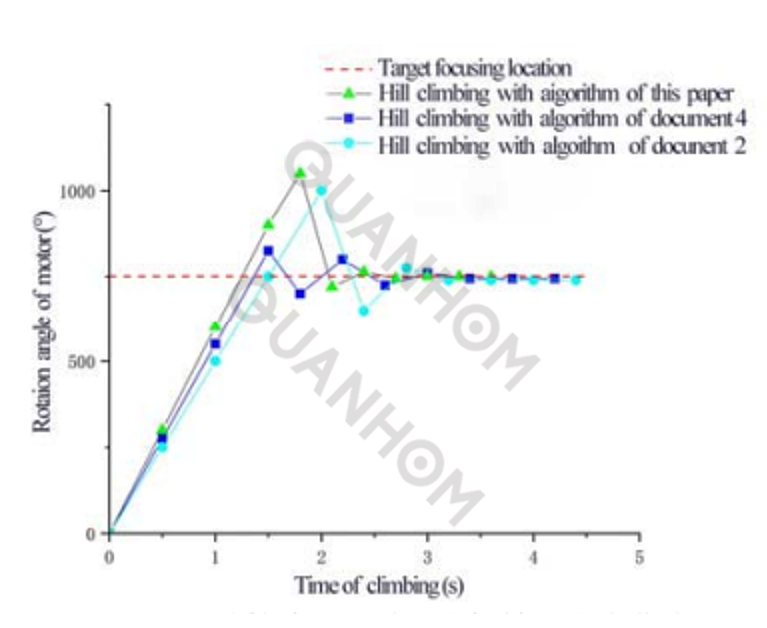
Fig.12 Courbes de focalisation de la rotation du moteur avec trois algorithmes pour l'alpinisme
On peut voir sur la figure 12 :
(1) L'algorithme d'escalade proposé dans cet article comporte un pas relativement grand au début, il peut donc grimper rapidement jusqu'au sommet de la montagne. À la fin de la troisième ascension, il a dépassé le sommet de la montagne, donc la longueur du pas de la quatrième ascension est réduite pour juger s'il s'agit d'un « pseudo-sommet » ;
(2) Les trois algorithmes sont plus précis pour juger du « sommet de la montagne » car l'image elle-même est relativement propre et le bruit est faible, donc l'escalade secondaire proposée par l'algorithme dans cet article ne joue pas de rôle ici ;
(3) L'algorithme proposé dans cet article et l'algorithme proposé dans la littérature [4] sont plus réactifs que l'algorithme proposé dans la littérature [2] pour juger de la tendance à la baisse, et le contrôle est meilleur ;
(4) L'algorithme proposé dans cet article a essentiellement atteint un état stable (fin de mise au point) après la septième montée et a atteint la fin de mise au point aux troisièmes, et les deux autres ont atteint un état stable après la huitième montée. La littérature [2] L'algorithme de [4] prend 3,6 s, et l'algorithme de [4] prend 3,4 s ;
(5) Les trois algorithmes présentent des différences dans la taille du pas de réglage et dans chaque temps de fonctionnement. Il ressort donc de la figure 12 que le temps du processus d'escalade au début est relativement cohérent et que le temps est incohérent s'il n'y a pas de temps. ajustement à un stade ultérieur ;
(6) Du point de vue de l'effet de focalisation final, l'algorithme proposé dans cet article est meilleur que l'effet de focalisation de la littérature [2] et de la littérature [4], et l'effet de focalisation de la littérature [2] est le pire, ce qui est identique à l'effet de focalisation illustré à la figure 10.
4.3 Test de temps de mise au point automatique
Le système de mise au point automatique de l'objectif infrarouge basé sur l'architecture FPGA peut mieux effectuer le travail de mise au point automatique. Le mode de travail à processeur unique présente également un grand avantage par rapport aux autres architectures en termes d'intégration de produits.
Dans le même temps, ce système offre également de meilleures performances en temps réel. À en juger par les références, d’autres schémas ne précisent pas trop le temps de mise au point automatique. Pour la conception proposée dans cet article, elle peut être contrôlée dans un délai de 5 s entre le début de l’imagerie et la fin de la mise au point. L'analyse principale de la consommation de temps est présentée dans la figure 13. La durée totale est de 3,55 s, ce qui est meilleur que le temps de mise au point automatique de la plupart des caméras infrarouges du marché.
4.4 Consommation des ressources FPGA
Cet article utilise 1/3 de l'écran entier pour calculer la valeur d'énergie du gradient, principalement pour économiser les ressources FPGA et le temps de calcul. D'après le temps de calcul, la différence entre le calcul de l'énergie du gradient de pixel de l'image entière et le calcul de 1/3 de la zone est de 42,84-4,76 = 38,08 ms. Bien que ce temps soit faible pour les 4,55 s utilisés dans l'ensemble du processus de focalisation, il s'agit d'un temps relativement long pour le fonctionnement du programme interne du FPGA.
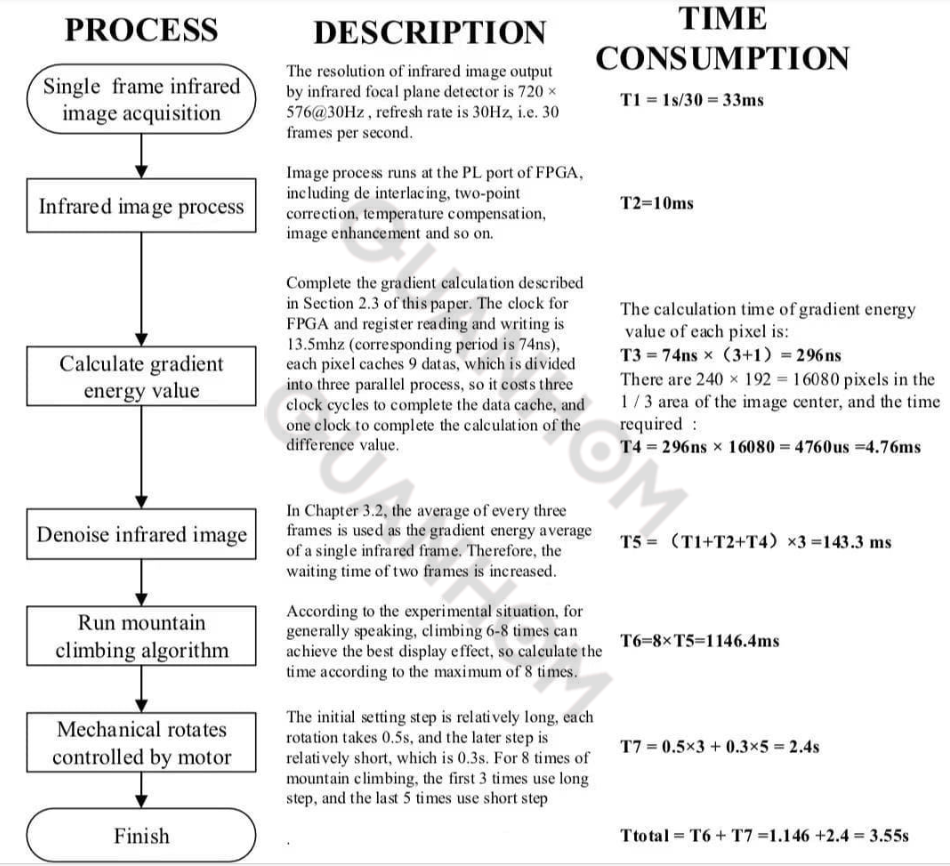
Fig.13 Temps passé en autofocus
Pour la consommation des ressources internes du FPGA, la différence entre les deux est également relativement importante. Le tableau 2 répertorie la consommation des ressources FPGA par les deux méthodes.

Il ressort du tableau 2 que la méthode de mise au point automatique utilisée dans cet article n'utilise pas beaucoup de ressources FPGA internes, même si elle est effectuée pour tout l'écran, les ressources du XC7Z030 sont suffisantes. Mais pour les FPGA, moins les ressources sont utilisées, plus le programme est contrôlable.
Visant la mise au point automatique de l'objectif du dispositif d'imagerie thermique infrarouge, cet article propose une technologie de mise au point automatique de la lentille infrarouge basée sur FPGA. Par rapport à la technologie de mise au point automatique en lumière blanche visible et à la technologie de mise au point infrarouge traditionnelle, la technologie proposée dans cet article présente trois améliorations majeures :
①L'ensemble de la machine utilise un seul processeur FPGA pour terminer le traitement de l'image infrarouge, l'affichage et le travail de mise au point de l'objectif, ce qui améliore considérablement l'intégration du produit ;
② Visant les caractéristiques des images infrarouges et les avantages du traitement parallèle des données FPGA, un algorithme amélioré d'énergie de gradient est proposé, qui peut véritablement évaluer la clarté des images infrarouges ;
③Selon les caractéristiques des images infrarouges, l'algorithme d'alpinisme est amélioré et optimisé pour filtrer efficacement les faux sommets des montagnes et atteindre l'objectif de l'alpinisme.
Cet article vérifie les trois améliorations techniques ci-dessus, et les résultats vérifient également la supériorité de l'algorithme proposé dans cet article. À l'heure actuelle, la technologie de mise au point automatique proposée dans cet article a été appliquée avec maturité aux produits d'imagerie thermique, et ses fonctions et performances sont au premier niveau de l'industrie, et elle a une bonne importance en matière de promotion. En tant qu'expert en caméras thermiques infrarouges depuis de nombreuses années, Quanhom peut partager des connaissances professionnelles et complètes en optique infrarouge.
En tant que fabricant expérimenté deComposants opto-électromécaniques, Quanhom s'engage à fournir aux utilisateurs une variété de caméras infrarouges thermiques (LWIR, MWIR et SWIR) d'excellente qualité. Nous jouissons d’une bonne réputation dans l’industrie grâce à une technologie de R&D de pointe et une excellente technologie de fabrication. Et nos produits sont vendus partout dans le monde et ont reçu les éloges et la confiance de nombreux clients. Si vous souhaitez en savoir plus sur nos services associés, vous pouvez nous faire part de vos besoins, et nous vous apporterons une réponse satisfaisante dans les plus brefs délais.
Auteurs : Sun Shaowei, Yang Yuetao, Yang Bingwei, Wan Anjun, Zhong Hailin
Source du journal : Vol.43 No.5 Technologie infrarouge mai 2021
Date de réception : 2020-11-07 ; date de révision : 2021-03-24.
Les références:
[1] ZHAO Zhibin. Recherche sur la technologie de mise au point automatique de la caméra à lumière visible pour plate-forme photoélectrique aéroportée [D]. École supérieure de l'Académie chinoise des sciences (Institut d'optique, de machines de précision et de physique de Changchun), 2010.
[2] NI Wenjia. Système de surveillance vidéo à mise au point automatique basé sur FPGA[D]. Wuhan : Université de technologie de Wuhan, 2012.
[3] LI Shenyang. Algorithme de mise au point automatique basé sur la valeur énergétique de l'image infrarouge [J]. Technologie électronique du Shanxi, 2014(4) : 6-9.
[4] ZHANG Bo, ZHANG Gang, CHENG Yongqiang. Conception d'un processeur vidéo avec fonction de mise au point automatique [J]. LCD et affichage, 2010, 25(3) : 396-400.
[5] WAN Xiaofan, LYU Yaowen, ZHANG Dongyan. Conception d'un système en ligne d'imageur thermique infrarouge à mise au point automatique [J]. Technologie infrarouge, 2018, 40(8) : 743-748.
[6] WANG Jian. Recherche sur la technologie de mise au point automatique basée sur le traitement d'image[D]. Chengdu : École supérieure de l'Académie chinoise des sciences (Institut de technologie optoélectronique), 2013.
[7] XU Zhili. Recherche sur le système d'autofocus SEM basé sur FPGA[D]. Nanjing : Université du Sud-Est, 2016.
[8] CHEN Guojin, ZHU Miaofen, ZHANG Kesong. Etude d'une fonction d'évaluation de la netteté du processus de focalisation d'imagek[J]. Acquisition et traitement des données, 2009, 24(2) : 165-169.