Conception d'un système de mise au point infrarouge à double champ basé sur DSP
- Partager
- Heure de diffusion
- 2022/4/12
Résumé
Les systèmes infrarouges à double champ sont largement utilisés dans les équipements de reconnaissance optoélectroniques. Dans cet article, en fonction des caractéristiques de fonctionnement du système optique infrarouge à double champ, un ensemble de systèmes de focalisation de lentilles optiques basés sur DSP est conçu.
Le système optique infrarouge à double champ peut fournir simultanément deux images avec des grossissements différents et des champs de vision différents. Un grand champ dans le système a une faible résolution et est utilisé pour rechercher des cibles dans une large gamme ; un petit champ est utilisé pour identifier, analyser et confirmer des cibles spécifiques. Par conséquent, le système infrarouge à double champ de vision est largement utilisé dans les équipements de reconnaissance aéroportés, montés sur véhicule et autres équipements optoélectroniques.
Dans cet article, en fonction des caractéristiques de fonctionnement et des exigences techniques du système optique infrarouge à double champ, un ensemble de systèmes de focalisation de lentilles optiques basés sur DSP est conçu. En appliquant l'idée de conception d'intégration optomécanique, les fonctions de commutation et de mise au point rapides de grands et petits champs de vision sont réalisées grâce au déplacement parallèle du groupe de lentilles optiques le long de l'axe.
1 La conception du système de mise au point
1.1 Sélection de la méthode de mise au point
Habituellement, le système de zoom à double champ de vision est divisé en deux catégories : dans la lentille infrarouge à double champ de vision , le groupe de lentilles optiques entrant et sortant du système de zoom à commutation et le système de zoom à deux positions. Le système de zoom commutable nécessite d'insérer une partie de l'objectif dans la position appropriée pour modifier la distance focale du système optique, de sorte que la taille latérale est grande. Le système à double position modifie la distance focale du système en modifiant la distance axiale du groupe de lentilles, ce qui peut réduire efficacement le volume du système et peut réaliser simultanément les fonctions de commutation du champ de vision et de mise au point précise. .
Compte tenu des exigences de qualité et d'espace du système global, un système de zoom à double position qui déplace le groupe de lentilles optiques parallèlement le long de l'axe est adopté. Le système de zoom à deux positions se compose d'un groupe fixe avant, d'un groupe d'objectifs mobiles et d'un groupe fixe arrière. Son principe de fonctionnement est illustré à la figure 1. Lorsque le groupe de lentilles mobiles est en position 1, le système est dans un état de focale courte (grand champ de vision), et lorsque le groupe de lentilles mobiles est en position 2, le système est dans un état de longue focale (petit champ de vision).
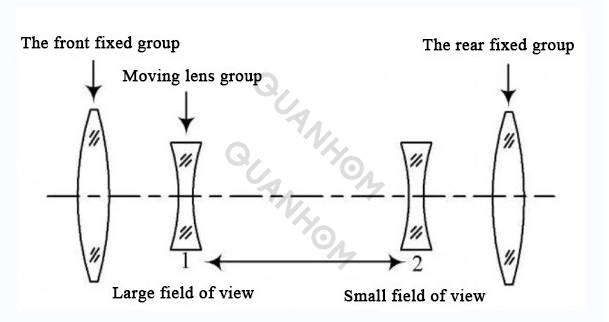
Figure 1 Diagramme schématique de l'optique infrarouge à double champ
1.2 Conception du système de mouvement de focalisation
L'ensemble du système de mouvement de mise au point est composé d'un système de contrôle en boucle fermée avec un module de contrôle DSP comme noyau. Le diagramme schématique du système est présenté à la figure 2. Il est principalement composé des éléments suivants : module de commande DSP, servomoteur, vis mère, module coulissant, guide linéaire de précision, règle de réseau linéaire, etc. Le module DSP contrôle la rotation. du moteur après avoir accepté la commande de contrôle de l'ordinateur hôte et change le mouvement de rotation du moteur en mouvement linéaire axial du groupe de miroirs mobiles via le mécanisme de mouvement du guide à vis. La règle du réseau linéaire détecte la position actuelle du glissement du groupe de lentilles et la renvoie au DSP. Le module de commande DSP compare la position actuelle du groupe de lentilles mobiles avec la position donnée du système, et commande en outre le moteur pour amener le groupe de lentilles à se déplacer dans la direction axiale jusqu'à ce que le groupe de lentilles mobiles atteigne la position donnée du système.
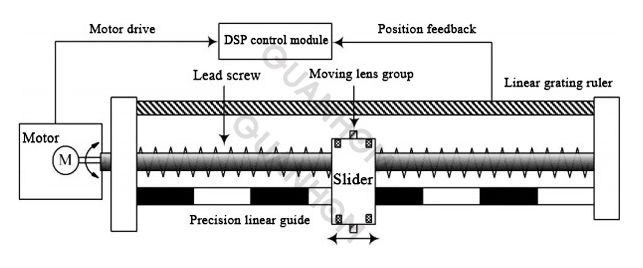
Figure 2 Diagramme schématique du système de focalisation
2 Se concentrer sur la conception du matériel système
Le circuit matériel du système de mise au point est basé sur le contrôleur DSP. TMS320LF 2407A est un processeur de signal numérique à virgule fixe 16 bits. Il intègre des capacités de traitement du signal numérique à grande vitesse et des circuits périphériques optimisés adaptés au contrôle du moteur, fournissant au contrôle du moteur un ensemble de solutions numériques avec à la fois une haute précision et des performances élevées. La conception du circuit périphérique du système de contrôle s'articule autour du TMS320LF 2407A, qui est principalement composé des éléments de base suivants : le circuit d'interface de communication série avec l'ordinateur hôte, le circuit de commande de puissance et le circuit de détection de position, etc. Le schéma fonctionnel du système de contrôle est présenté à la figure 3.

Figure 3 Schéma fonctionnel du matériel du système de contrôle DSP
2.1 Circuit de communication série SCI
Le système peut réaliser la communication entre le DSP et l'ordinateur hôte via le module de communication série SCI intégré par la puce TM S320LF 2407A. Le circuit adopte l'ordinateur hôte de la puce pilote MAX232 conforme à la norme RS232 pour envoyer des commandes de contrôle au module de contrôle DSP. Le système DSP répond aux commandes de contrôle en calculant la position donnée du groupe de lentilles mobiles, en contrôlant le mouvement du moteur pour terminer la mise au point du système et, parallèlement, en envoyant un retour d'informations sur l'état de fonctionnement actuel du système de contrôle de mise au point à l'ordinateur hôte.
2.2 Circuit de détection de position
La clé d’un contrôle précis de la position du groupe de lentilles mobiles est la détection de son déplacement. La règle de réseau de précision RGH22 de la société Renishaw au Royaume-Uni est sélectionnée comme capteur de position avec une résolution de 2 μm. Le signal de sortie est constitué de deux changements de fréquence et orthogonal (c'est-à-dire une impulsion avec une différence de phase de 90°). Sa tête de lecture est dotée de zéro de référence et de doubles fins de course. Le zéro de référence fournit une origine de référence ou un point zéro répétable, et le fin de course peut émettre un signal lorsque le mouvement axial atteint les points limites aux deux extrémités pour arrêter le moteur.
Chaque gestionnaire d'événements EV du TMS320LF 2407A contient un circuit d'impulsions décodées en quadrature QEP, qui peut coder et compter les impulsions d'entrée décodées en quadrature générées par la règle de réseau. Une fois que la règle de réseau a généré l'impulsion de codage en quadrature et l'a envoyée au circuit de codage en quadrature, le circuit QEP peut déterminer la direction de déplacement du groupe de lentilles mobiles en détectant la séquence des deux séquences, ainsi que le déplacement actuel et la vitesse du miroir mobile. Le groupe peut être calculé par le nombre d'impulsions et la fréquence d'impulsion. Depuis la sortie du réseau, la règle est un signal de niveau numérique de 5 V, et le DSP ne peut accepter que le signal de niveau de 3,3 V, la puce SN74LV C245 est utilisée comme circuit d'interface de conversion de niveau entre le DSP et la tête de lecture du réseau.
2.3 Circuit d'entraînement du moteur
Dans le système de mise au point, le signal PWM émis par le DSP après traitement des informations collectées n'est pas suffisant pour piloter directement le moteur, et une puce pilote est nécessaire pour le convertir en un signal de commande pouvant piloter le moteur. Le circuit d'entraînement du moteur adopte la puce d'entraînement du moteur L298N de la société SGS. Il s'agit d'une puce moteur à double pont en H avec tension constante et courant constant, qui peut contrôler deux moteurs à courant continu en même temps, et le courant de sortie peut atteindre 2A. Afin de réduire l'influence du circuit de commande sur le système de contrôle, le signal PWM généré par le DSP est isolé optoélectroniquement par l'optocoupleur TLP521 puis envoyé à la puce de commande L298, ce qui rend le signal de commande du système stable et fiable. De plus, en pratique, pour protéger le moteur, deux groupes de diodes de roue libre doivent être ajoutés au circuit de commande.
3 Résultats expérimentaux
La bande de travail du système optique infrarouge à double champ est de 3 à 5 μm. La largeur du champ de vision est de 24°×18° et le champ de vision étroit est de 4°×3°. La focale courte est de 20 mm et la focale longue est de 145 mm. La distance de commutation entre les grands et petits champs de vision est de 125 mm et la précision de positionnement requise du groupe de lentilles mobiles est inférieure à 20 μm. Grâce à des tests expérimentaux, le système de mise au point peut basculer entre des champs de vision grands et petits en 1 seconde, et la précision de mise au point peut atteindre 5 μm, ce qui répond à la précision de positionnement requise par le système. La figure 4 montre les images du système optique infrarouge sous un grand et un petit champ de vision, respectivement.

Figure 4 Système optique images à grand et petit champ de vision
4. Conclusion
Cet article présente un système de contrôle de mise au point de lentille optique infrarouge à double champ, qui adopte le mouvement axial du groupe de lentilles mobiles pour réaliser un zoom. Un seul ensemble de dispositifs électromécaniques est nécessaire pour réaliser simultanément les fonctions de commutation et de mise au point du champ de vision, contrôlant ainsi efficacement les dimensions axiales, rendant sa structure plus compacte. Le système de contrôle adopte la puce TMS320LF 2407A haute performance comme unité de contrôle du système, ce qui rend la conception de l'ensemble du circuit matériel simple et fiable. Il répond aux exigences du système d'imagerie optique infrarouge en matière de commutation rapide du champ de vision et de précision de mise au point élevée.
Quanhom est un fournisseur professionnel de lentilles infrarouges personnalisées et de composants de systèmes . Notre équipe R&D de pointe excelle dans la conception et la fabrication transparentes de vos concepts de produits d’optique infrarouge thermique. Des simples sous-ensembles d'éléments de lentille infrarouge aux assemblages optomécaniques et électro-optiques complexes sophistiqués et fiables. Si vous en avez besoin, veuillez nous contacter .
Les références
[1] Ren Deqing. La conception optique de l'objectif infrarouge à double champ [J]. Technologie infrarouge, 1998,20(3):19-22.
[2] Chen Lvji. Système optique infrarouge à double champ de vision pour imageur thermique à plan focal non refroidi [J]. Technologie infrarouge, 2007,29(11):645-647.
[3] Yang Yulong, Guan Fulin, Zhang Tuqiao et al. Conception du modèle et contrôle du mécanisme de focalisation du miroir d'imagerie du télescope solaire spatial [J]. Génie mécanique chinois, 2006, 8(17) : 313-316.
[4] Liu Heping, Yan Liping, Zhang Xuefeng et al. Principe structurel du TM S320LF240x DSP
et application [M]. Pékin : Presse de l'Université d'aéronautique et d'astronautique de Pékin, 2002.
[5] Liu Jinkun. Simulation Matlab de contrôle PID avancé [M]. Pékin : Electronic Industry Press, 2004.
[6] Hu Jin, Zhong Xingrong, Wang Jiajun. Recherche sur un imageur proche infrarouge basé sur la méthode du domaine fréquentiel
[J].Technologie électronique moderne, 2007, 30(22):125-126.
[7] Li Yunhong, Li Junhua, Li Pei. Application de la technologie d'imagerie thermique infrarouge dans les centrales électriques [J].
Technologie électronique moderne, 2008, 31(6):181-183.