Le principe de fonctionnement et la composition du capteur infrarouge
- Partager
- Éditeur
- Mikasa Tang
- Heure de diffusion
- 2022/8/5
Résumé
Le capteur infrarouge est l’une des principales unités fonctionnelles du système infrarouge. Sa tâche principale est de détecter diverses cibles dynamiques et statiques et de transmettre les signaux cibles détectés aux informations infrarouges et à l'unité de traitement d'image pour le traitement. Cet article présente donc brièvement le principe de fonctionnement et la composition du capteur infrarouge.
Le principe de fonctionnement et la composition du capteur infrarouge
1. Le principe de fonctionnement du capteur infrarouge
Une fois que le rayonnement infrarouge de la cible et de l'arrière-plan traverse la lentille de l'objectif, il est imagé sur le plan focal du composant de détection. Le composant de détection infrarouge convertit le rayonnement infrarouge en signaux électriques et le circuit de prétraitement via le signal infrarouge. Une fois le signal infrarouge soumis à un double échantillon corrélé (CDS), un filtrage électronique et une conversion A/D, NUC, élimination des défauts et tri par synthèse sont effectués. Ensuite, le signal numérique parallèle est envoyé à l'unité de traitement cible potentielle via une certaine ligne de transmission à distance pour un traitement ultérieur.
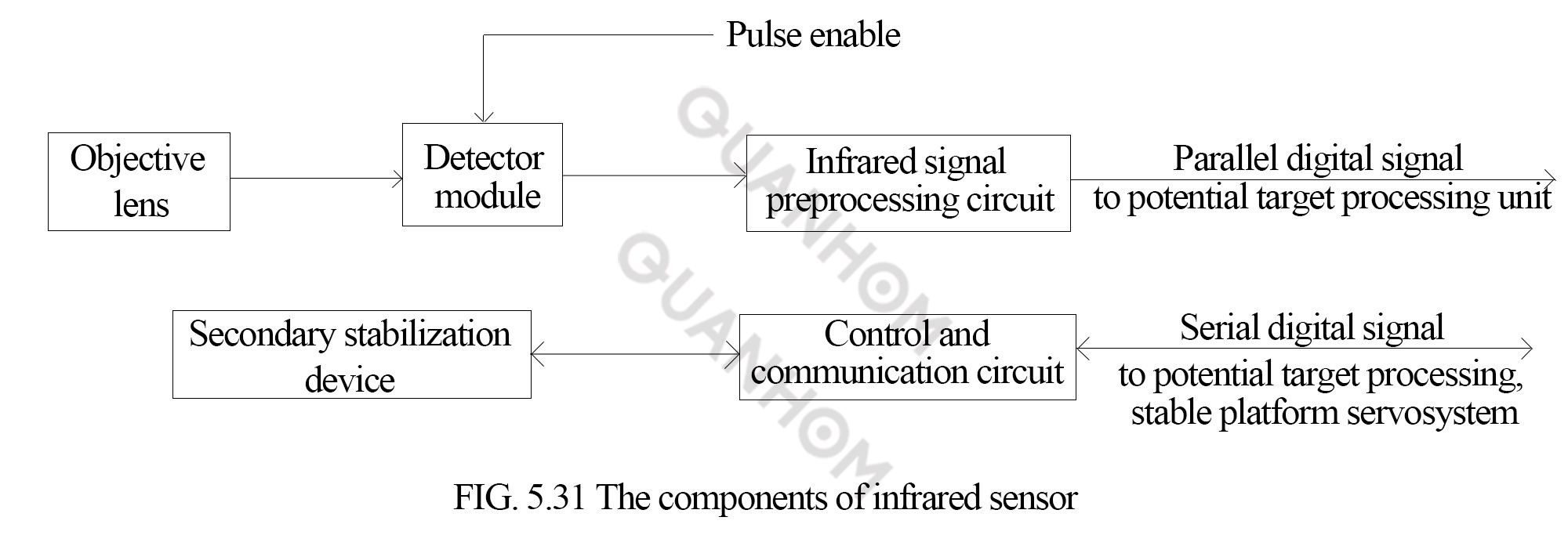
2. Les composants du capteur infrarouge
Le capteur infrarouge est composé d'une lentille d'objectif (système optique infrarouge), d'un module de détection infrarouge, d'un circuit de prétraitement du signal infrarouge, d'un dispositif de stabilisation secondaire et d'un circuit de contrôle et de communication. Il est représenté sur la Fig. 5.31.
2.1 Objectif
L'objectif du capteur infrarouge a des exigences élevées en matière de qualité d'image et d'efficacité optique, et la conception optique classique ne peut pas garantir l'efficacité optique de l'objectif. Par conséquent, l’objectif doit être conçu comme un système optique à transmission asphérique. Le design est composé d'une variété de matériaux pour corriger l'aberration chromatique dans la bande de travail.
2.2 Composants de détection infrarouge
Un composant de détection infrarouge est composé des éléments suivants :
(1)ID TL005 288×4 LWIR Composant IDDCA.
(2) Circuit générateur d'impulsions d'horloge du détecteur : génère le signal d'impulsion nécessaire pour assurer le fonctionnement normal du détecteur.
(3) Circuit de polarisation du détecteur : génère la tension de polarisation requise par le fonctionnement normal du détecteur.
(4) Circuit générateur d'activation d'impulsion, le circuit de lecture CCD du détecteur active le signal généré par le système de mesure d'angle, l'arrivée d'activation d'impulsion, le circuit générateur d'impulsion d'horloge doit générer le signal d'impulsion requis par CCD.
3. Circuit de prétraitement du signal infrarouge
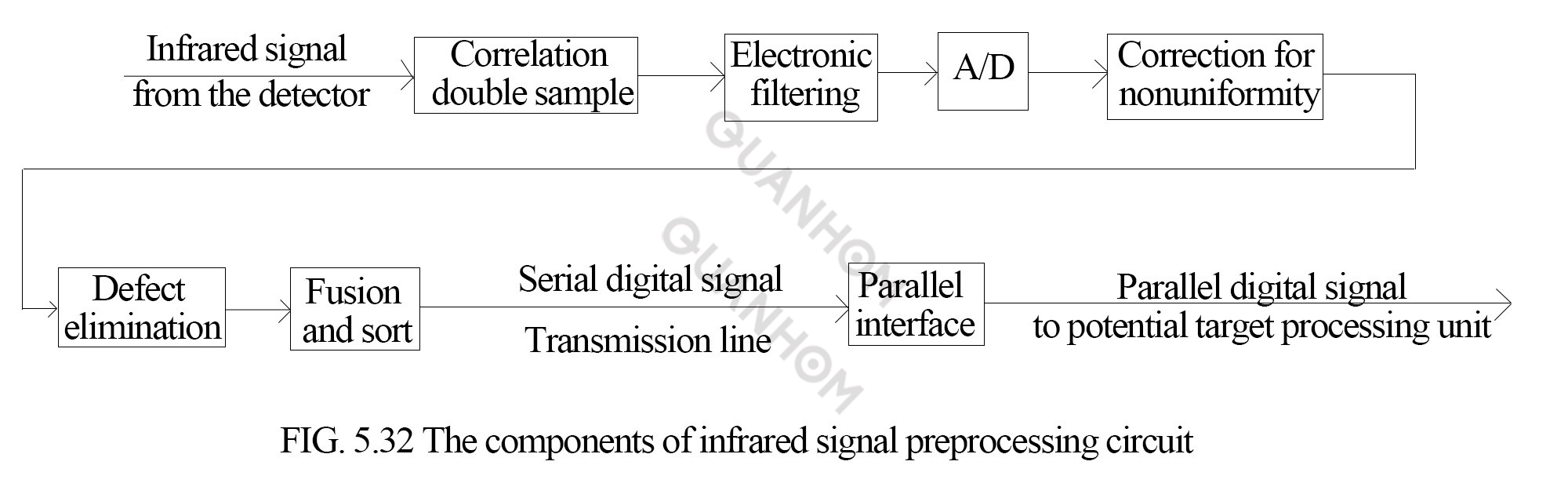
(1) CDS : il est appliqué au signal de sortie du détecteur pour filtrer le bruit de commutation généré par le circuit de lecture du détecteur.
(2) Filtrage électronique : il peut filtrer le bruit basse fréquence, supprimer le bruit haute fréquence et améliorer le rapport signal/bruit.
(3) Conversion A/D : elle peut être utilisée pour convertir les signaux infrarouges en quantités analogiques/numériques, et le niveau de quantification est de 12 bits.
(4) NUC : il peut corriger le signal de sortie de chacun des 288 canaux du détecteur. Pour garantir que sous l'action d'une même énergie de rayonnement infrarouge, la non-uniformité des signaux générés par chaque canal soit inférieure à 0,5 %. Pour les détecteurs à réponse linéaire, il suffit d'effectuer une correction en deux points de la réactivité et du point de biais ; pour les détecteurs à réponse non linéaire, un algorithme d'approximation linéaire par morceaux multipoint est requis pour la correction. Comme un certain type de système infrarouge doit couvrir 360°, il n'est pas possible d'incorporer une référence de température dans le système. Grâce à des recherches sur l'approximation linéaire par morceaux à deux points et multipoints et la compensation de non-uniformité basée sur la scène, les conditions de travail sont bénignes, puis un matériel général capable d'exécuter ces trois algorithmes est développé.
(5) Élimination des défauts : il est remplacé par la moyenne du signal de deux canaux non défectueux dans le voisinage du défaut pour obtenir l'élimination des défauts.
(6) Fusion et tri : le signal de la colonne précédente est retardé, ce qui équivaut au temps entre deux colonnes adjacentes. Après le traitement composite des deux colonnes, une colonne de signaux est formée pour terminer la fusion et le tri.
(7) Interface parallèle : elle consiste à émettre en parallèle le signal infrarouge numérique, le signal de synchronisation de pixels et le signal de synchronisation de colonne vers l'unité de traitement cible potentielle, et à recevoir simultanément le signal de synchronisation de colonne de l'unité goniomètre.
4. Circuits de contrôle et de communication
Fonctions :
(1) Recevoir un signal de commande (comprenant un signal de commande de correction d'uniformité, un signal de commande d'auto-vérification et un signal de commande de gain) de l'unité de traitement cible potentielle, et envoyer un signal de résultat d'auto-vérification à l'unité de traitement cible potentielle.
(2) Recevez le signal d'attitude de la plate-forme du système d'asservissement de la plate-forme stabilisée.
(3) Contrôler le dispositif de stabilisation secondaire.
(4) Contrôlez le circuit de prétraitement du signal infrarouge.
5. Dispositif de stabilisation secondaire
Le dispositif de stabilisation secondaire se compose d'un miroir, d'un gyroscope, d'un servomoteur et d'un circuit d'entraînement. Sa fonction est d'effectuer une stabilisation secondaire précise de l'axe optique infrarouge.